O termo Open Source
foi criado pela OSI (Open Source
Initiative) e refere-se a software também conhecido por software livre.
Genericamente trata-se de software que respeita as quatro liberdades
definidas pela Free Software Foundation,1 compartilhadas também pelo projeto Debian, nomeadamente
em "Debian Free Software Guidelines (DFSG)". Qualquer licença de software livre é também uma licença de código
aberto (Open Source), a diferença entre as duas nomenclaturas reside
essencialmente na sua apresentação. Enquanto a FSF usa o termo "Software Livre"
envolta de um discurso baseado em questões éticas, direitos e liberdade, a OSI
usa o termo "Open Source"
sob um ponto de vista puramente técnico, evitando (propositadamente) questões
éticas. Esta nomenclatura e discurso foram cunhados por Eric Raymond e outros
fundadores da OSI com o objetivo de apresentar o software livre a empresas de uma forma mais
comercial evitando o discurso ético.
Como a diferença
entre os movimentos "Software Livre" e "Open Source" está apenas na argumentação em prol dos
mesmos softwares, é comum
que esses grupos se unam em diversas situações ou que sejam citados de uma
forma agregadora através da sigla "FLOSS"
(Free/Libre and Open Source Software).
Os defensores do
movimento Open Source sustentam que não se trata de algo anticapitalista ou anarquista,
mas de uma alternativa ao modelo de negócio para a indústria de software. O modelo
colaborativo de produção intelectual oferece um novo paradigma para o direito de autor. Algumas grandes empresas
como IBM, HP, Intel e Dell também têm investido no software de código aberto, juntando esforços
para a criação do Open Source
Development Lab (OSDL), instituição destinada à criação de
tecnologias de código aberto.
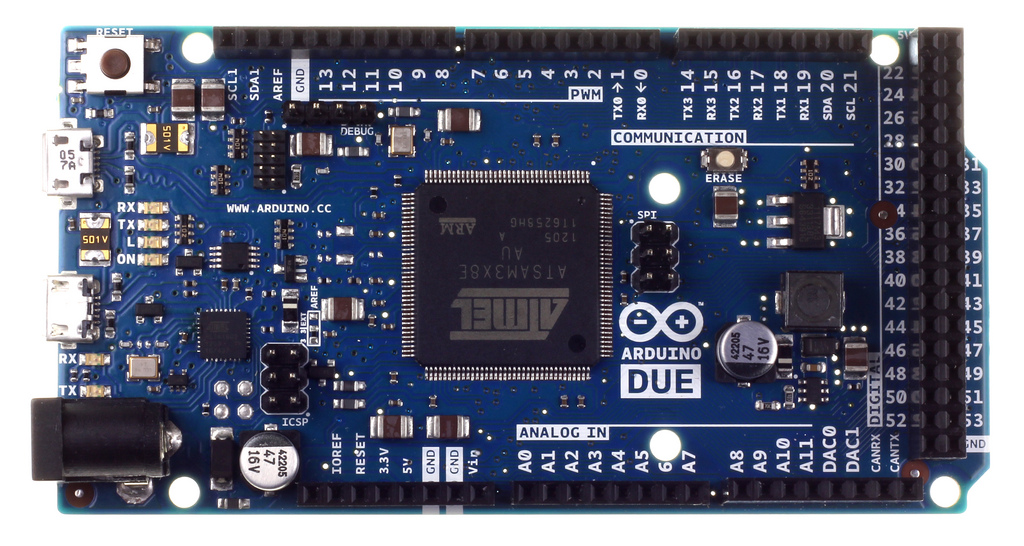
Hardware Livre é um hardware eletrônico projetado e oferecido da mesma maneira
que um software de código livre.
O termo foi primeiramente empregado para refletir o lançamento irrestrito de informaçãosobre
o projeto de hardware, tal como um diagrama, estrutura de produtos e dados de layout de uma placa de circuito impresso.
Com o crescimento dos dispositivos lógicos reprogramáveis, o
compartilhamento dos esquemas lógicos de forma aberta também se espalhou. Ao
invés de compartilhar as esquemáticas, é o código dalinguagem de descrição de hardware que normalmente se divide. Suas
descrições popularmente são usadas para configurar um system-on-a-chip ou através de FPGA ou diretamente via ASIC. Estes módulos,
quando distribuídos, são chamados de núcleos semicondutores de propriedade
intelectual.
Ao invés de criar uma nova licença, alguns projetos de
simplesmente usam licenças de software livre (SL) existentes. Além dessas, outras novas licenças
foram propostas e esquematizadas para suportarem hardwares específicos, muitas
são consideradas o equivalente do hardware de licenças de programas, como a GPL, LGPL ou a BSD. Nelas, muitos dos princípios fundamentais do software livre
foram "importados". Normalmente, as organizações tendem a
agruparem-se em torno de uma licença compartilhada para todos os seus projetos.








{kind=link}